

如何制造足球机器人 (上)

《如何制造足球机器人》系列分为上、下两篇,将为大家介绍如何使用英飞凌相关产品完成足球机器人的制造。本文为上篇,主要为大家介绍在正式制造机器人之前需要确定机器人理念和规格部分。
制造足球机器人:确定理念
为了重现马拉多纳的五人超车,接下来以“压倒性的敏捷性和可操作性”为理念,开始制造足球机器人。首先在制造足球机器人的过程中,需要满足以下几点要求:
- 通过无线通信从控制器控制主机
- 进行运球、传球、射门等一系列动作
- 使用 PSoC (英飞凌的微控制器) 作为 SOC
- 响应控制器输入执行某种反馈操作 (LED 、音频、动作等)
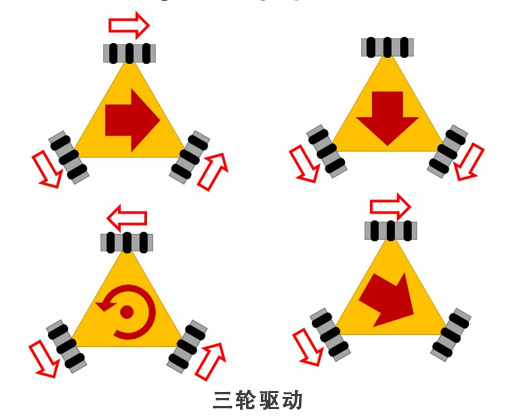
毫不夸张地说,确定理念是创造机器人最重要的部分。首先采用全向轮作为足球机器人的核心轮以实现压倒性的敏捷性,如下图 (图1) 所示:

其次这个轮子在垂直方向上也有小轮胎,所以这个轮子可以让机器人向前、向后、向左、向右、对角移动,以及旋转身体,如下图 (图2) 所示:
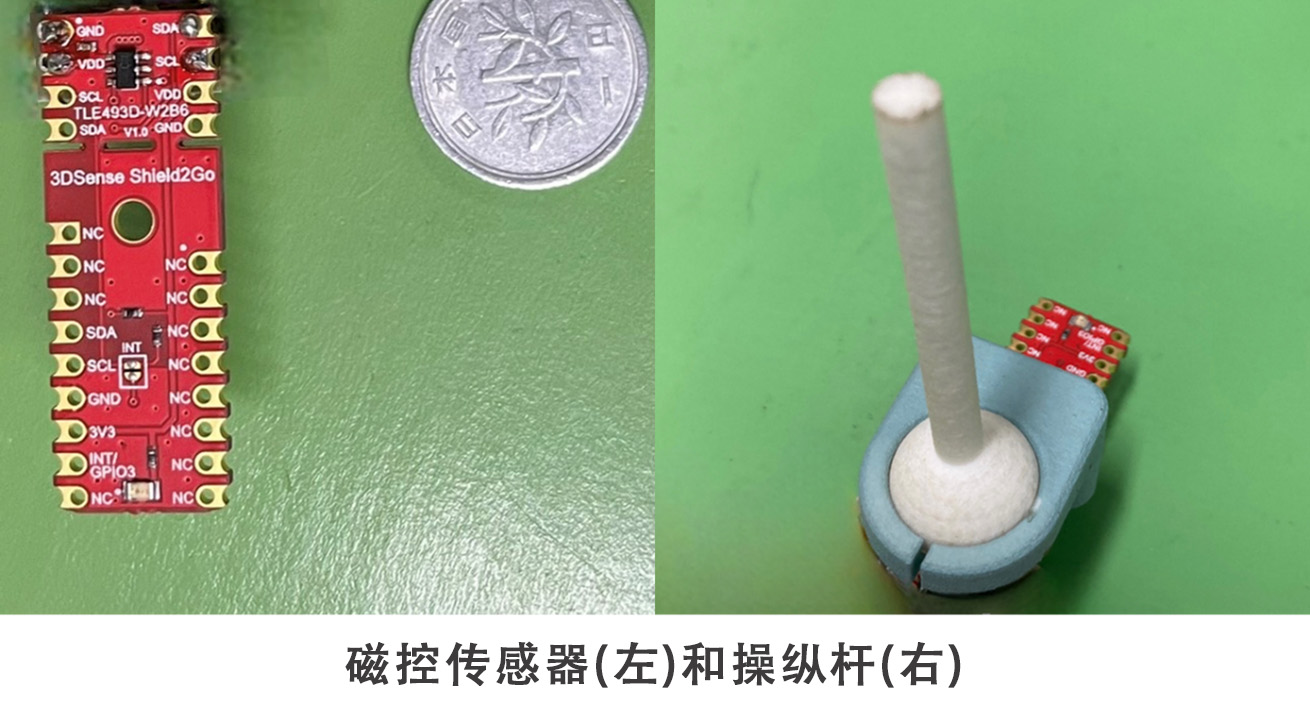
关于可操作性,可使用英飞凌的 3D 磁传感器,并实现一个类似于游戏机控制器的操纵杆来控制机器人的八个方向,如下图 (图3) 所示:
以上已经确定了机器人的理念,那么接下来将根据这个理念来确定规格。
制造足球机器人:确定规格
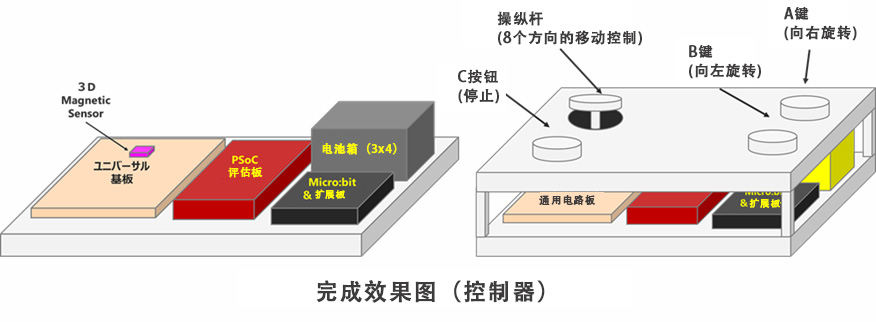
如下图 (图4) 所示,根据控制器操纵杆倾斜的方向,机器人可以在八个方向上移动,并通过 SOP 控制,以便使用机械开关进行旋转和停止。控制器和机器人之间的通信由一块名为 Micro:bit 的微控制器板完成,SOP 发出的信号被传送到机器人。
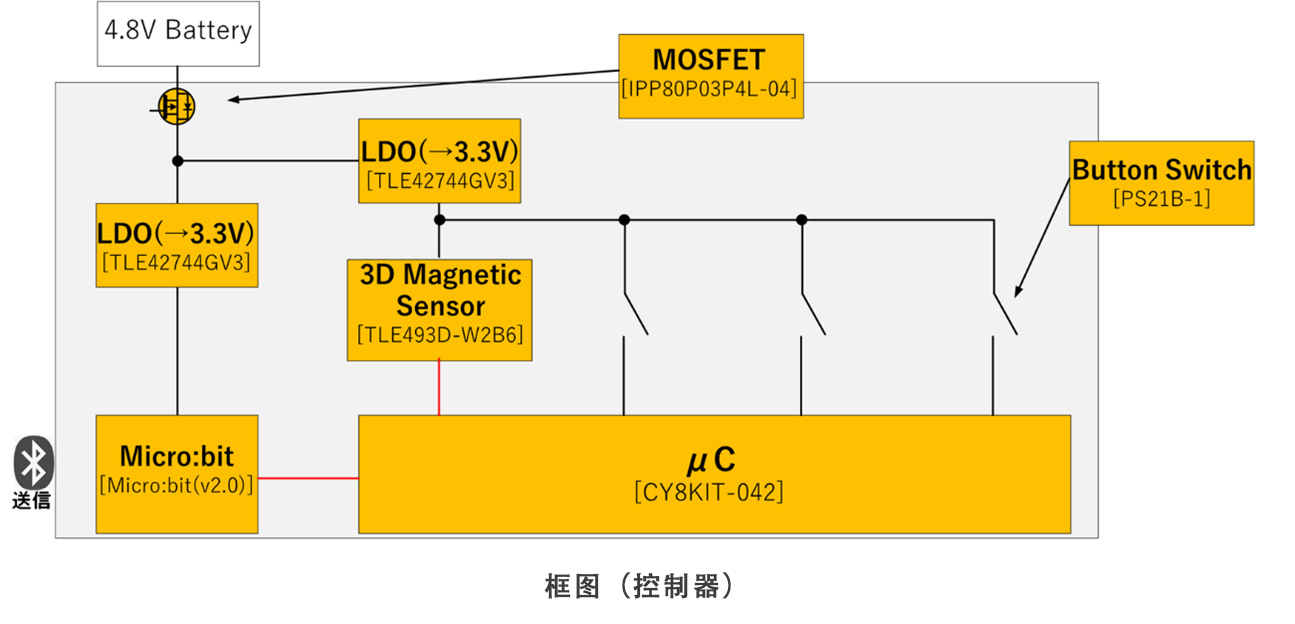
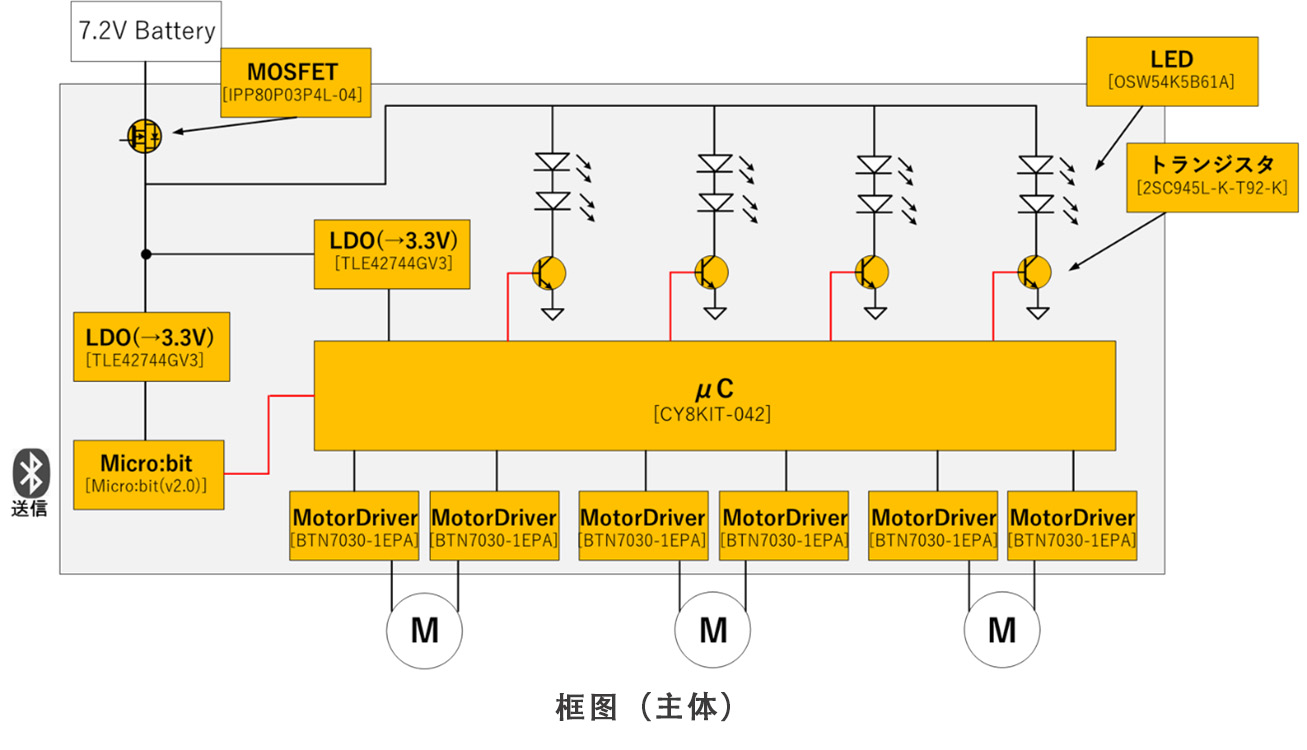
根据规格选择了部件后可绘制如下图 (图5) 所示的框图:
机器人的电机由一个英飞凌半桥式 (Half Bridge) 电机驱动器控制,该驱动器将两个 MOSFET 和一个栅极驱动器集成到单个芯片中。通过为一台电机使用两个半桥驱动器,可以配置一个 H 桥 (H Bridge) 并控制正向和反向旋转。SOP 根据来自控制器的信号控制电机驱动器。机身四侧还安装了发光二极管,其功能是根据每次运动动作点亮每个发光二极管。

同样的,根据规格选择了部件可创建了如下图 (图7) 所示框图:
总结
到目前为止,从决定理念、决定规格到创建框图,已取得不错的进展,在《如何制造足球机器人 (下)》将为大家介绍如何开始正式制造足球机器人。欲了解更多技术细节和英飞凌相关产品信息,您可以点击下方「联系我们」,提交您的需求,骏龙科技公司愿意为您提供更详细的技术解答。