


ADI MEMS技术解析 – 加速度计和陀螺仪工作原理以及参数详解

自90年代起,针对MEMS惯性器件的研究越来越多,MEMS惯性传感器亦开始在商业上广泛应用。本文分别对MEMS加速度计、MEMS陀螺仪基本工作原理以及MEMS应用进行了比较详细的介绍,对MEMS惯性传感器发展趋势进行了初步推断。ADI在MEMS技术方面有深厚的积累,MEMS产品主要有加速度传感器、陀螺仪,以及由加速度传感器和陀螺仪组合而成的惯性导航单元(IMU)。MEMS传感器内部采用质量块,在运动过程中质量块产生运动,通过测量质量块和参考面之间的电容特性,就可以计算出线性加速度或者转动的角速率。
MEMS 加速度计工作原理
加速度计测量物体相对运动
比如人在列车上,当列车加速离开车站时由于惯性人体与列车会发生相对运动,相对运动的距离与产生加速度的力成正比,如下图所示:
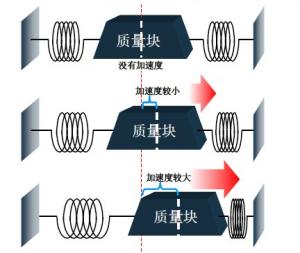
加速度计的模型其实是一个由弹簧质量块组成的阻尼系统,当质量块由于惯性作用压缩弹簧的时候会产生弹性力,该弹性力符合胡克定律F=KX,K是弹簧的劲度系数,X是弹簧压缩或者伸长的距离。我们知道力是改变物体运动状态的原因,符合牛顿第二定律F=Ma,M是质量块的质量,a是产生的加速度。这样的话通过联立KX=Ma可推导出加速度a=KX/M,这样我们只要知道X值就可以得出加速度a,因为K和M是定值。
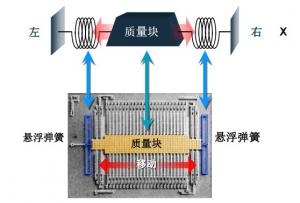
加速度计通过测量内部差分电容的变化来反映质量块的移动距离X
上面已经推导出来加速度a与X有关,那么加速计内部是怎么测量X值的呢?如下图所示:
 |
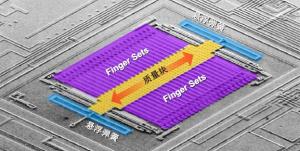 |
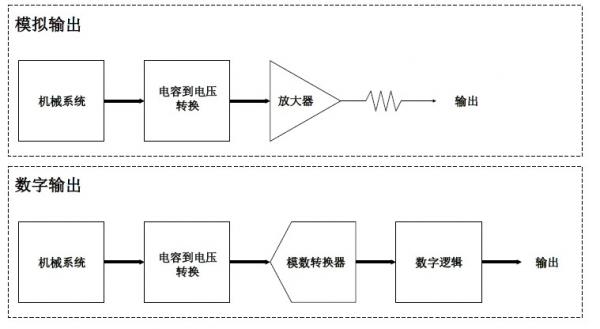
加速度计内部质量块结构都带有伸出来的手指对(finger sets),在移动过程中,手指对与固定极板可形成可变的电容,加速度计就是通过检测该电容值变化来反馈移动距离的。因此完整的加速度计结构是由微机械系统,电容转电压电路和调理输出电路组成,然后三个轴工作原理类似,X/Y轴是差分结构,Z轴由于加速度计结构的问题只能做一侧的弹簧,因此不具有差分结构,Z轴的噪声和精度相对于X/Y轴能差点儿。
下图就是加速计系统框图:
MEMS 陀螺仪计工作原理
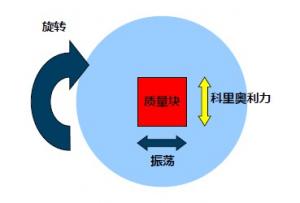
基于MEMS的陀螺仪,是利用科里利奥力,对MEMS内部施加一个X方向的激励信号,当质量块相对于震荡的系统产生Z轴方向的旋转运动时,由于Y方向的科里利奥力,质量块就产生Y方向的运动,通过计算电容的变化,就可以计算出对应的角加速度值。
什么是科里奥利力?
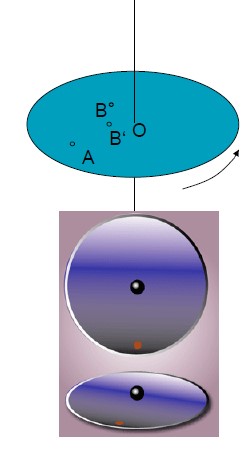
如下图所示:设在以角速度ω沿逆时针方向转动的水平圆盘上,有A,B两点,O为圆盘中心,且有 OA>OB,在A点以相对于圆盘的速度V沿半径方向向B点抛出一球。如果圆盘是静止的,则经过一段时间:△t =(OA-OB)/ V后,球会到达B,但结果是球到达了B转动的前方一点B’,对这个现象可如下分析,由于圆盘在转动,故球离开A时,除了具有径向速度V’外,还具有切向速度VA,而B的切向速度为VB,由于B的位置靠近圆心,所以VA>VB,在垂直于AB的方向上,球运动得比B远些。这是在盘外不转动的惯性系观察到的情形。对于以圆盘为参考系的B,他只看到A以初速度向他抛来一球,但球并未沿直线到达他而是向球运动前方的右侧偏去了,对这一结果的分析发现,球在具有径向初速度V’的同时,还具有了垂直于这一方向而向右的加速度a’,应用牛顿第二定律对于加速度的解释,既然球出手后在水平方向上没有受到“真实力”的作用,那么球一定受到了一个垂直于速度V’而向右的惯性力Fc。这种在转动参考系中观察到的运动物体(由于转动参考系中各点的线速度不同而产生)的加速现象即为科里奥利效应,产生此效应的虚拟的惯性力叫科里奥利力。
利用科里奥利力进行公式推导:
以转动系为参考系,球从A到B’的时间是
△t’=(OA-OB)/V’
在△t’时间内,球偏离AB的距离
BB’=(VA-VB)*△t’
=ω*(OA-OB)*△t’
= ω*V’* △t’^2
在△t’很小的情况下,可以认为沿BB’的运
动是匀加速运动而初速为0,则
BB’=1/2*a’* △t’^2
与上一结果比较可得:
a’=2*ω*V’
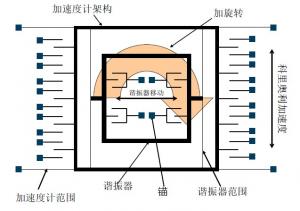
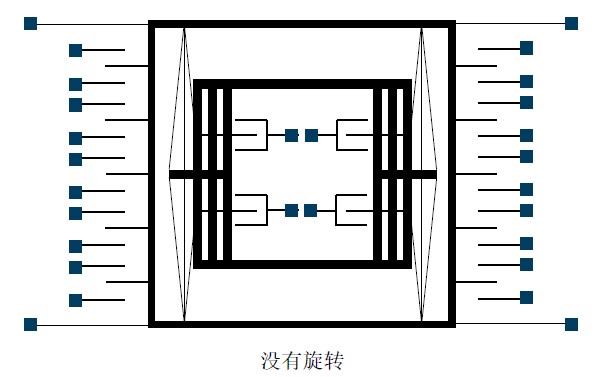
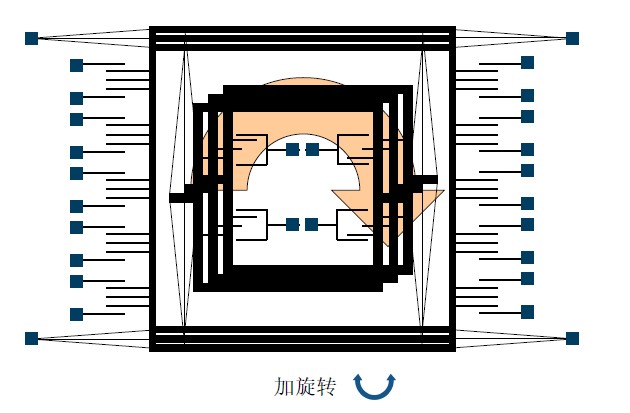
通过推到公式测量出虚拟加速度a’就可以测量出来角速度ω了,下面的图示例出了科里奥利力的与系统的方向已经MEMS内部架构,加旋转与没加旋转的原理:
 |
 |
 |
 |
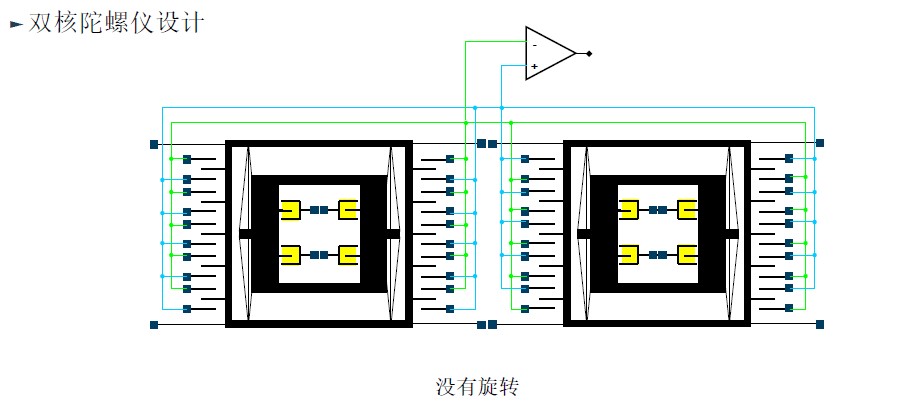
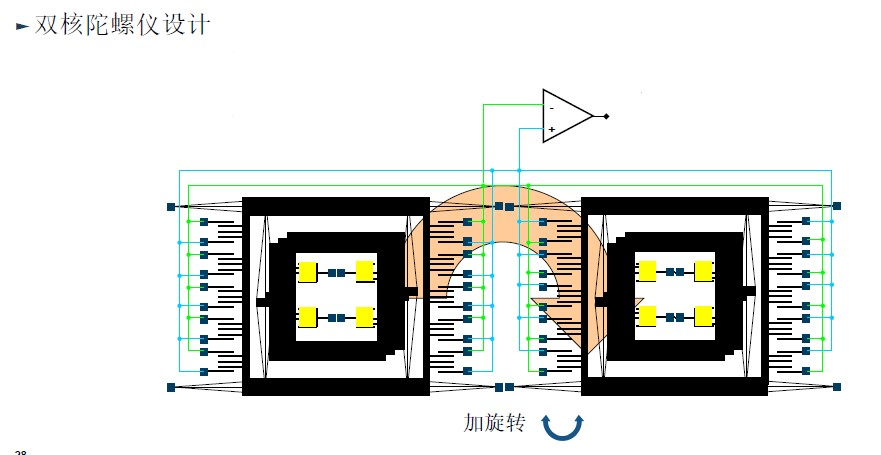
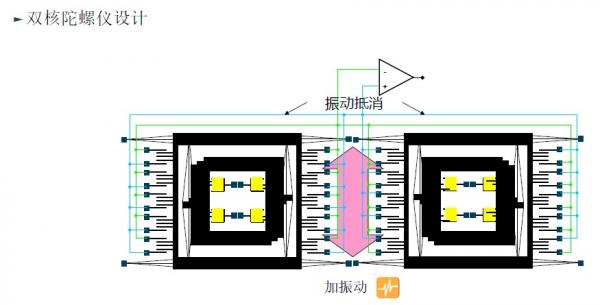
单质量块MEMS陀螺仪问题
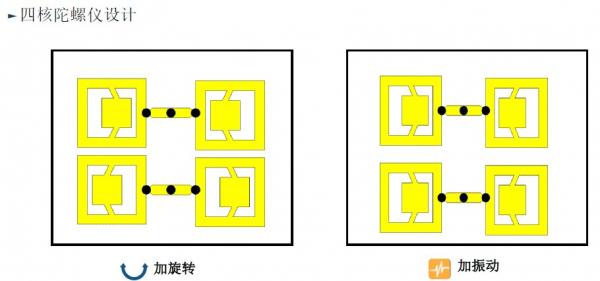
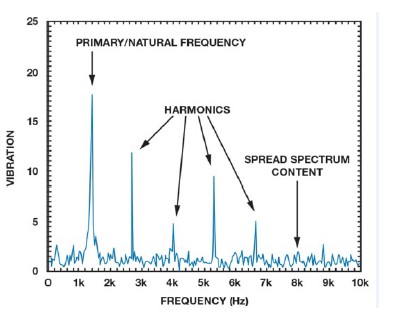
单质量块陀螺仪不能区分旋转(待测量)和与内部谐振器相同频率的振动。外部的振动会那么容易产生与内部谐振器相同的频率吗?答案是肯定的,比如冲击事件,其时域输出是脉冲,相应的频谱成分无限丰富,此时,单质量块陀螺仪即无法区分该事件和实际的旋转角速度。ADXRS系列陀螺仪至少采用两个质量块,它们以相同的频率振荡,但相位相差180°此时冲击和振荡表现为共模输出,所以采用差分操作可以抑制掉很多误差。 如下图所示:ADI双质量块陀螺仪和四质量块陀螺仪设计思路。
 |
 |
MEMS 传感器应用
我们举例说明,如何使用加速度传感器测量不同状态量。
测量倾角
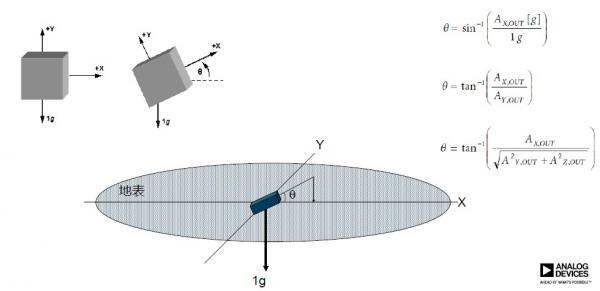
如下图:使用加速度传感器测量倾角的原理很简单。X轴在垂直方向的投影值就是X传感器的加速度值。Xout = 1g * Sin(ɸ), ɸ = arcsin(Xout). 但是在实际测量中,地球上每个地区的加速度存在一定的偏差,如果我们再辅助Z轴的信息, Zout = 1g * cos(ɸ), ɸ = arctan(Xout/Zout), 就可以消除加速度差异引起的误差。 实际角度测量过程中,会受到温度漂移、振动整流误差、初始误差等因素的影响,造成测量角度误差。
速度和位置测量
速度的测量就是利用物理学公式,V=at。速度就是对加速度进行时间内积分。位置测量同样利用物理学公式 S = (V0+0.5*at)t, 对于加速度进行双重积分就可以得到位移。对于积分的方法,可以利用加速度的模拟输出,通过模拟的积分电路,获得速度和位移。也可以利用数字输出,通过软件积分计算出速度和位移。但是由于加速度计自身偏移和温漂,特别DC到低频的偏移会造成累计的误差。所以通常由加速度获取的速度和位移,一般有低频带宽限制。
振动分析
当物体出现振动时,物体瞬时振动的幅度和瞬时加速度之间,存在固定关系:
A = 4 * p² * ƒ² * displacement. 举例来说,如果被测物体振动频率为1kHz, 产生 1µm的振动幅度。A = 4 * p² * (10³)² * 10-6 = 39.5g,从这个公式可以看出,振动频率对于加速度的贡献非常大。振动分析对于加速度自身带宽要求很高,而且对于机械结构设计存在巨大挑战。在振动分析领域,早期压电陶瓷传感器被广泛应用,但是随着MEMS工艺和设计的提升,MEMS技术可以支持到非常高的振动频率,由于MEMS具有更低的低频噪声,更好的抗振动性,MEMS逐渐被大量使用在振动分析领域。
结合上面原理介绍,MEMS传感器技术已经广泛应用于民用的很多领域上。例如在穿戴设备(智能手环,智能手表),智能城市(智能井盖,智能垃圾桶)等消费类设备上,ADXL362就被广泛使用,最主要就是它的低功耗以及唤醒特性等。
在振动检测领域,ADI大量程、高带宽的ADX35X和ADXL100X系列已经被广泛使用:包括对于高铁列车轴振动检测、大型电力设备运转,以及数控集装设备的运行状态和寿命检测等。通过MEMS传感器可以有效的检测到设备异常,在早期进行预警,避免对于正常的生产和生活造成损失和伤害。最近发生在无锡市的桥梁侧翻事故,虽然产生的原因是车辆超载引起,但是如果在桥梁上安装了类似振动传感器,就可以有效地根据历史的振动数据来判断桥梁的承载能力和谐振频率等,从而对于超载车辆进行有效限制,也许灾难就可以避免。
对于倾角检测,ADXL35X由于其超低的偏移特性和振动整流误差特性,可以用在复杂场景进行精确的角度检测。例如对于基站、电力塔、风力发电等重要设备的倾角检测等。
ADI的组合导航产品,例如ADIS16470、ADIS16475已经广泛用在无人机、无人车和AGV的导航和姿态控制领域。对于最近特别火热的无人驾驶技术,ADIS16465和ADIS16495产品已经被广泛使用,并且已经在很多无人驾驶的车上,结合卫星导航实现性能优异的组合导航产品,成为无人驾驶最为关键的技术之一。实际上,在很多发达国家,由于农业已经形成了规模经济和现代化,惯性导航已经广泛用于农业机械设备,进行完全自动的播种、收割作业。
MEMS 传感器未来发展的方向
速度和位置测量
导航、自动驾驶和个人穿戴设备等对惯性传感器的精度需求逐渐提高,精细化测量 需求和智能化的发展也对传感器的精度提出了越来越高的要求。
微型化
器件的微型化可以实现设备便携性,满足分布式应用要求。微型化是未来智能传感设备的发展趋势,是实现万物互联的基础。
高集成度
无论是惯性测量单元还是惯性微系统都是为了提高器件的集成度,进而实现在更小的体积内具备更多的测量功能,满足装备小体积、低功耗、多功能的需求。
适应性强
随着MEMS惯性传感器的应用范围越来越广泛,工作环境也会越来越复杂,例如:高温、高压、大惯量和高冲击等,适应复杂环境能够进一步拓宽MEMS惯性传感器的应用范围。
总结
MEMS 技术已经广泛应用于各类旋转设备的结构健康监测领域,高精度定位以及平台稳定控制领域同时在生命体征监测领域也有很多应用,ADI拥有适应不同应用需求参数的各类MEMS产品,同时针对某些特定领域开发有专用的MEMS产品,不论你是工业需求还是消费类需求,ADI总有一款MEMS产品适合你的应用。
参考资料
ADI內部培训资料
线上文章:MEMS是怎样的技术,哪些已经民用了?